熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A



上面這副圖就是我們今天要處理的了,我們想把它從拍照視角變成鳥瞰圖,這是機器人導航中的常用手段,以便在該平面上進行規劃和導航。
這種變換常常用到透視變換,但我們今天在講解透視變換時,需要普及一下其他的變換,包括平移,旋轉,錯切,放縮,以及仿射變換。
綜述
所有復雜的東西,都是由基本的組成的。所以我們需要先了解一下基礎的變換有哪些:
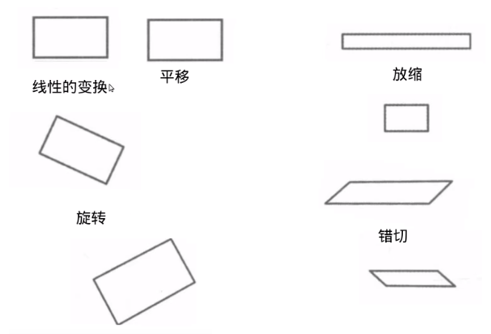
平移
我們對矩形(圖像)平移,需要怎么做?
對每一個像素點坐標平移。可以讓每一個像素點的x,y坐標都加一個變量。
矩陣形式表示:
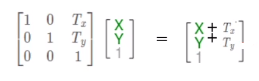
等式左邊[X,Y,1]是像素坐標的齊次形式。等式右邊是平移之后的坐標。
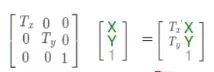
放縮
進行放縮,就是將矩形(圖像)放縮n倍,也就是長寬各乘一個變量。
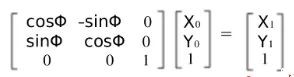
旋轉
對矩形(圖片)進行旋轉,關于旋轉的數學推導在后面仿射會介紹:
錯切
前面的都比較直觀,那錯切是什么呢?
我們可以看下矩形關于y方向的錯切:
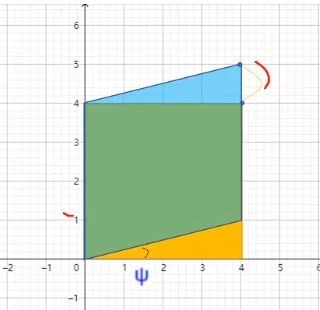
看圖就很直觀了,那數學表達呢?
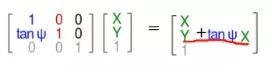
x軸上的錯切就是同理了,公式如下:
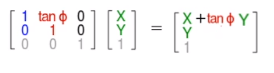
然后兩者和起來,就如下了:
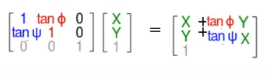
好了,到此我們就了解了這四種變換了,那仿射變換是什么呢?可以看下圖公式:

等式右邊就是仿射變換矩陣,是由原圖像平移,旋轉,放縮,錯切之后得來的。
在書上往往將仿射變換和透視變換放一起講,這兩者各是什么呢?
在剛學仿射變換和透視變換時,我是有些分不清的。印象最深刻的就是下圖:
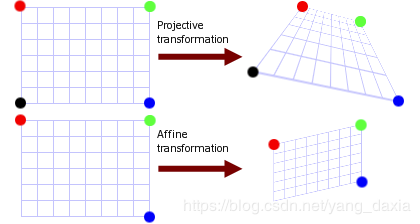
可以看到,仿射變換(下)是將矩形變換成平行四邊形(即變換后各邊依舊平行),而透視變換(上)可以變換成任意不規則四邊形。
這樣看來,好像仿射變換是透視變換的子集。
那到底是不是呢?其實是的。仿射變換屬于線性變換,而透視變換則不僅僅是線性變換。仿射變換可以看做是透視變換的一種特例。
直觀上感受,我們可以認為:
仿射變換是單純對圖片進行縮放,傾斜和旋轉,因此圖片不論如何變化,線之間的平行性是不變的。如下圖。

可以感受到,右圖是可以通過左圖平移,旋轉,錯切,縮放之后得來。
而透視變換,則是當觀察者的視角發生變化時物體發生的透視變換,此轉換允許造成透視形變。
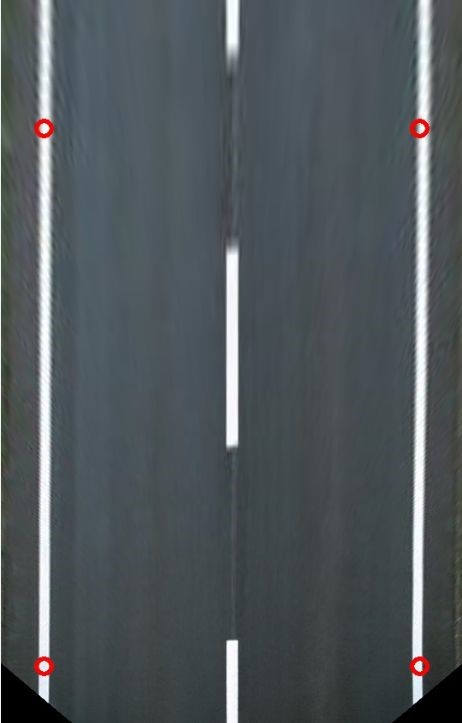
我們看下圖的公路,近處寬遠處窄,就是因為視角的原因,

而我們本文要做的,就是將視角改為鳥瞰,從而得到類似下圖的鳥瞰圖:
仿射變換原理
前文已經說了,仿射變換是單純對圖片進行平移,縮放,傾斜和旋轉,而這幾個操作都不會改變圖片線之間的平行關系。
opencv中給出了仿射變換的函數接口:
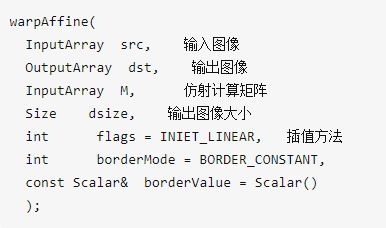
這個函數很好理解,輸入一個圖像,輸出這個圖像的仿射變換。
但第三個參數需要我們輸入2*3的仿射計算矩陣,這是什么鬼?
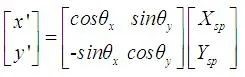
我們先看一下仿射計算矩陣長什么樣子(可以去掉最后一行):
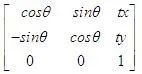
我們的輸出圖像G(x,y) = F(x,y)乘仿射矩陣。
我們可以看下圖推導出仿射計算矩陣。
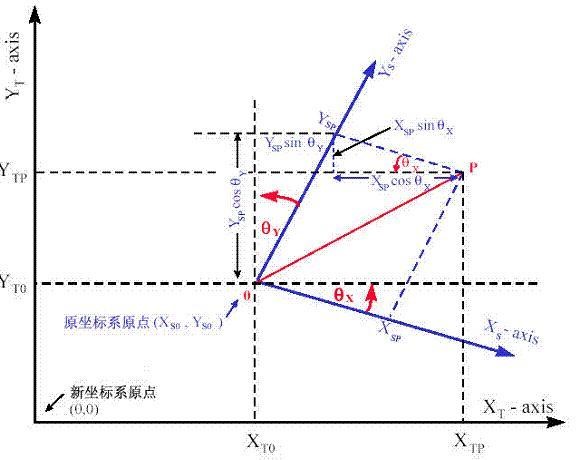
一個點P在原始坐標系下的坐標是(Xsp,Ysp)。然后要完成旋轉操作,旋轉操作是基于原點的。如何得到旋轉之后的點的坐標,這里用到一個技巧:
坐標系中某個點的旋轉可以等價地去旋轉坐標軸。
所以有了上圖中以(Xs0,Ys0)為中心的虛線與屏幕水平垂直的坐標系。在這個坐標系中確定P的坐標,和在藍色坐標系中確定旋轉之后P的坐標是等價的。
基于這個結論,我們可以通過簡單的立體幾何知識確定P在新坐標系中的坐標。P在新坐標系中的X坐標和Y坐標分別是

進而我們可以得到:
到此,我們完成了旋轉操作,如何平移呢?僅是加一個平移常數的事:
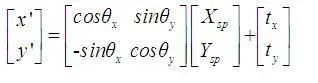
到此,我們的2*3大小的仿射變換便推導出來了。
推導知道了,但如何實現呢?
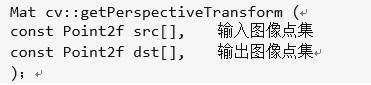
opencv同樣給我們提供了計算仿射矩陣的函數接口:
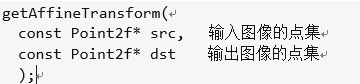
這個函數可以計算出我們想要圖像變換的矩陣,但需要我們輸入至少三對點集,點集是什么鬼?為什么是至少三對?
我們可以看到上面公式里有六個變量,因此自然需要至少列六個等式才可計算出該矩陣。
因此我們需要找輸入圖像和輸出圖像上一一對應的三對點(3個x,y對應計算式)來作為輸入。
這樣,我們就可以進行仿射變換啦。
透視變換原理
我們說仿射變換是在二維空間中的旋轉,平移和縮放。而透視變換則是在三維空間中視角的變化。
opencv中同樣給出了透視變換的函數接口:
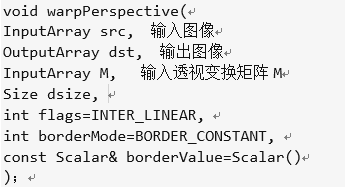
和仿射變換基本相同,不同的是輸入透視變換矩陣M大小為3*3:
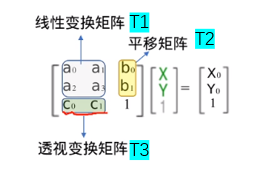
上面矩陣的未知量比仿射變換的矩陣多了一個透視變換矩陣T3(兩個未知量),因此我們需要給下面計算透視變換矩陣的函數提供四對以上的點來求解
T1為線性變換完成旋轉,錯切和放縮,T2完成平移操作。T3就是設了兩個變量來表示映射關系。
編程實現
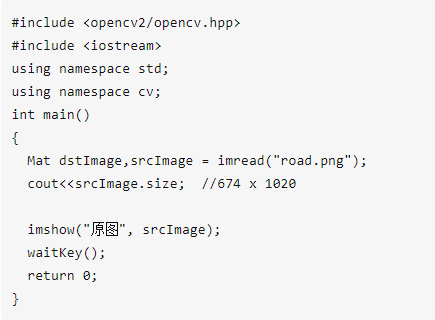
理解了透視變換的原理后,我們就著手來實現了(代碼可以順次復制即可運行):
首先是讀取原圖片并顯示啦:

然后我們需要選取原圖上的四個點,并計算出該四對點變換后的位置。
如何選點?我們可以選兩邊白條的四個定點。那變換后的位置就需要我們自己估算了,如下圖:
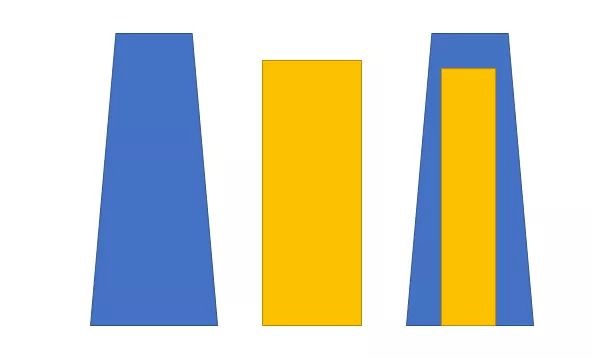
我們希望將藍色的透視變換為黃色的。

我們選取了如圖四個點,首先計算透視變換矩陣:

然后進行透視變換:
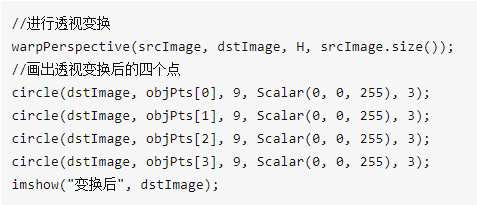

這樣,我們就得到鳥瞰圖啦。
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
